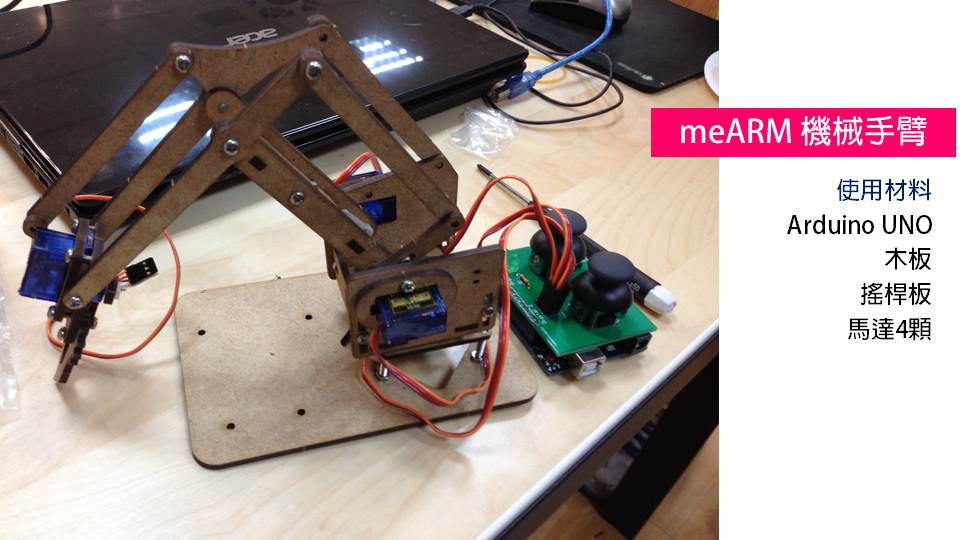
meARM 機械手臂創客工作坊
Nov, 2015

(宣傳照片版權屬桃園市政府青年事務局)
本來就一直對機械手臂很有興趣,湊巧在活動通上看到
這是個舉辦在中央大學的一日活動,藉由DIY套件,讓我們自己組裝機械手臂
其實只要弄懂四個伺服馬達設計出來的運動軌跡,原理就並不難懂
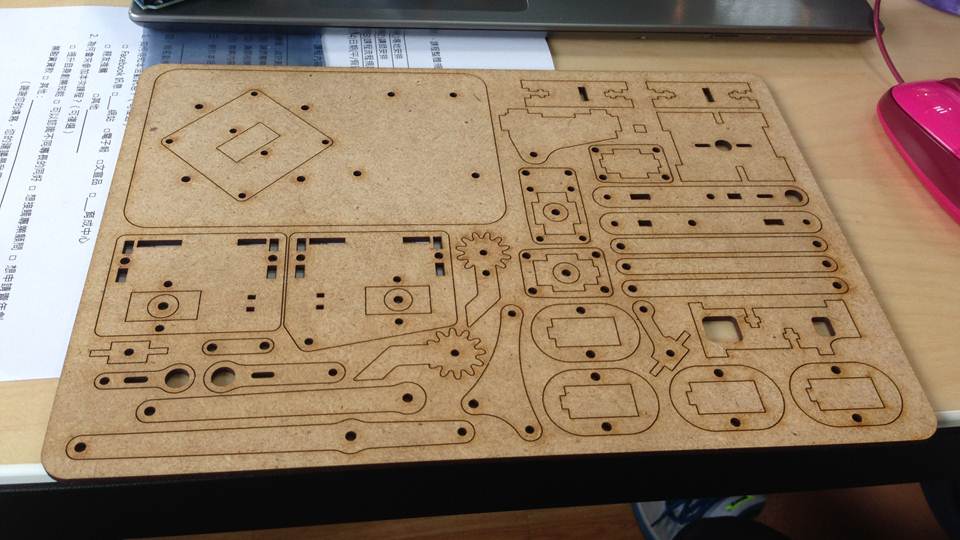
套件是由木板構成

左馬達的運動軌跡如黃線
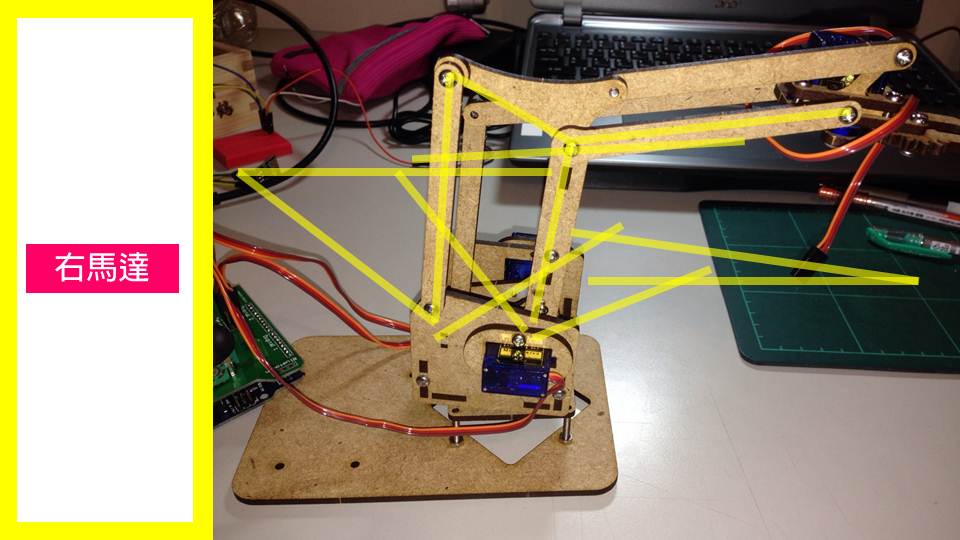
右馬達的運動軌跡如黃線
另外前馬達負責夾起物品,下馬達是旋轉基底
有興趣的人可以上官網或淘寶購買
所有都是開源的資料,如有大量需求可以自行洗電路、切割板子
以下附上我的程式碼
#include <Servo.h>
int value = 0 ;
int angle[4];
Servo servo_pin_11;
Servo servo_pin_10;
Servo servo_pin_9;
Servo servo_pin_5;
int pos;
void setup() {
// put your setup code here, to run once:
servo_pin_11.attach(11);
servo_pin_10.attach(10);
servo_pin_9.attach(9);
servo_pin_5.attach(5);
angle[0] = 90; //底座
angle[1] = 90; //左邊馬達
angle[2] = 90; //右邊馬達
angle[3] = 90; //前面馬達
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
for (int i= 0; i < 4 ; i++ )
{
value = analogRead(i);
// 底座
if (i == 0)
{
if(value < 300)
{
if (angle[0] > 0){
angle[0] = angle[0] - 1;}
}else if(value>700) {
if (angle[0] < 180){
angle[0] = angle[0] + 1;}
}
servo_pin_11.write(angle[0]);
}
// 左馬達
if (i == 1)
{
if(value < 300)
{
if (angle[1] > 0){
angle[1] = angle[1] - 1;}
}else if(value > 700)
{
if (angle[1] < 180){
angle[1] = angle[1] + 1;}
}
servo_pin_10.write(angle[1]);
}
// 右馬達
if (i == 2)
{
if(value < 300)
{
if (angle[2] > 0){
angle[2] = angle[2] - 1;}
}else if(value > 700)
{
if (angle[2] < 180){
angle[2] = angle[2] + 1;}
}
servo_pin_9.write(angle[2]);
}
// 前面
if (i == 3)
{
if(value < 300)
{
if (angle[3] > 0){
angle[3] = angle[3] - 1;}
}else if(value > 700)
{
if (angle[2] < 180){
angle[3] = angle[3] + 1;}
}
servo_pin_5.write(angle[3]);
}
Serial.print(value);
Serial.print(" ");
//value = 0;
}
Serial.println(" ");
delay(15);
}
int value = 0 ;
int angle[4];
Servo servo_pin_11;
Servo servo_pin_10;
Servo servo_pin_9;
Servo servo_pin_5;
int pos;
void setup() {
// put your setup code here, to run once:
servo_pin_11.attach(11);
servo_pin_10.attach(10);
servo_pin_9.attach(9);
servo_pin_5.attach(5);
angle[0] = 90; //底座
angle[1] = 90; //左邊馬達
angle[2] = 90; //右邊馬達
angle[3] = 90; //前面馬達
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
for (int i= 0; i < 4 ; i++ )
{
value = analogRead(i);
// 底座
if (i == 0)
{
if(value < 300)
{
if (angle[0] > 0){
angle[0] = angle[0] - 1;}
}else if(value>700) {
if (angle[0] < 180){
angle[0] = angle[0] + 1;}
}
servo_pin_11.write(angle[0]);
}
// 左馬達
if (i == 1)
{
if(value < 300)
{
if (angle[1] > 0){
angle[1] = angle[1] - 1;}
}else if(value > 700)
{
if (angle[1] < 180){
angle[1] = angle[1] + 1;}
}
servo_pin_10.write(angle[1]);
}
// 右馬達
if (i == 2)
{
if(value < 300)
{
if (angle[2] > 0){
angle[2] = angle[2] - 1;}
}else if(value > 700)
{
if (angle[2] < 180){
angle[2] = angle[2] + 1;}
}
servo_pin_9.write(angle[2]);
}
// 前面
if (i == 3)
{
if(value < 300)
{
if (angle[3] > 0){
angle[3] = angle[3] - 1;}
}else if(value > 700)
{
if (angle[2] < 180){
angle[3] = angle[3] + 1;}
}
servo_pin_5.write(angle[3]);
}
Serial.print(value);
Serial.print(" ");
//value = 0;
}
Serial.println(" ");
delay(15);
}
有興趣的人可以去活動通隨時關注關於Arduino相關的活動